Don’t hesitate to contact us:
Forum: discuss.graphhopper.com
Email: support@graphhopper.com
We’re proud to announce that we’ve once again become a Gold Corporate Member of the OpenStreetMap Foundation! OpenStreetMap is a global, open-source mapping project that allows anyone to contribute and use free geographic data. As a Gold Corporate Member, we’re supporting their mission to create a free and open map of the world. We believe […]
Almost exactly 10 years ago we released a first version of our open source project GraphHopper. 6 years ago we founded the company GraphHopper. Both would not have been possible without OpenStreetMap. To give back a little bit we are again Gold Corporate Member of the OpenStreetMap Foundation and offer our routing service for free […]
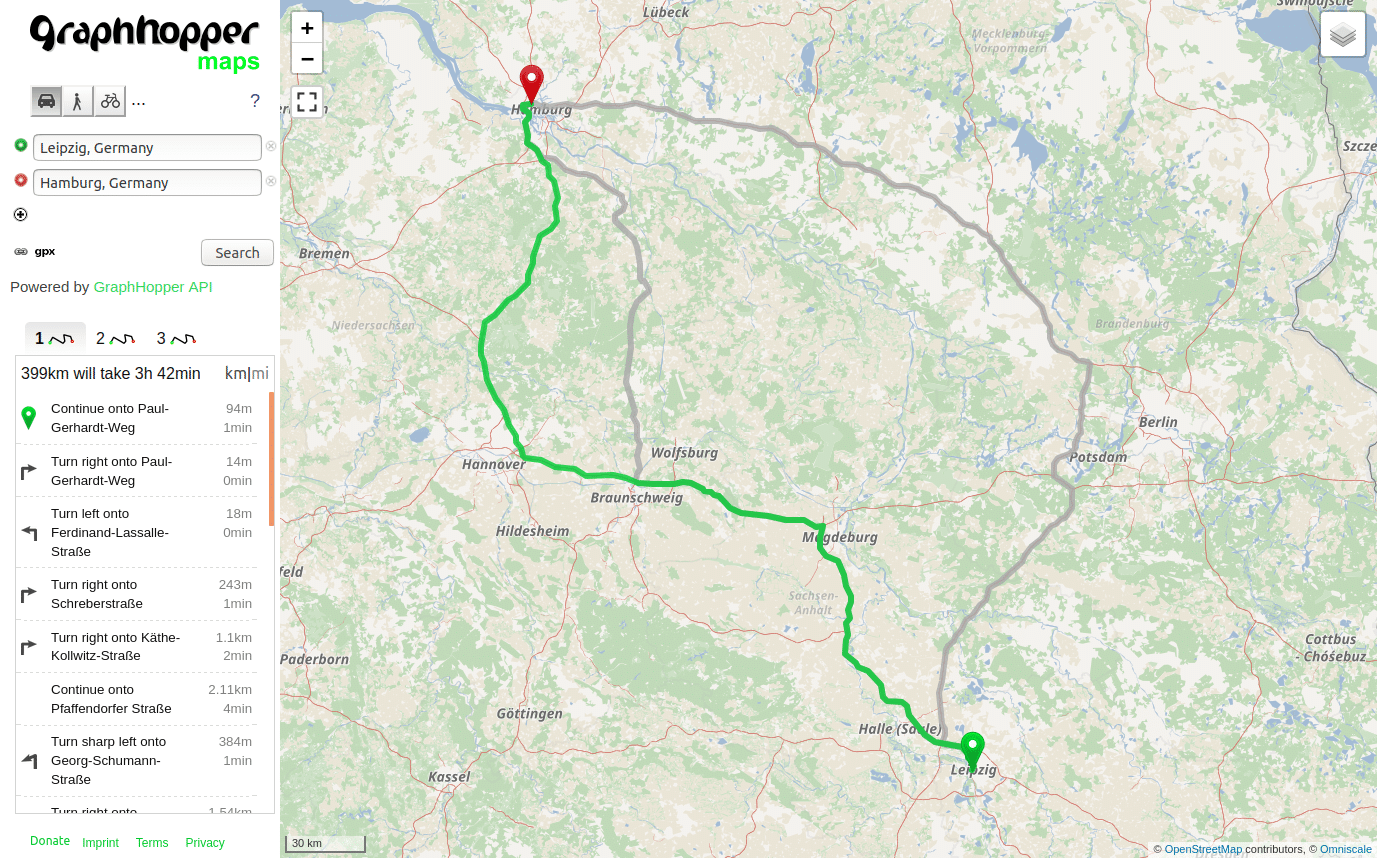
Today, after more than 8 years of work, we are releasing version 1.0 of the open source GraphHopper routing engine. GraphHopper calculates optimal routes in road networks (for example taken from OpenStreetMap) for many different vehicle types and finds the ideal itinerary when using public transit. It is released under the Apache License 2.0 and […]

Today the GraphHopper routing engine turned 8 years. It has now over 2500 stars at GitHub and together we pushed over 4300 commits with contributions from over 80 contributors – thanks a lot! See here for the first commits and read the blog post about the new release 1.0. Additionally we invested into our other […]
Today, we are proud to announce the release of GraphHopper 0.13. GraphHopper is an open source routing engine for roads and public transit, released under the Apache License 2.0. By default it uses OpenStreetMap and GTFS data and it can import other data sources. The demo is called GraphHopper Maps and shows most road routing […]